The walker bug relies on two chips: one is the oscillator which ensure the cadence movement and the other drives the two servomotors.
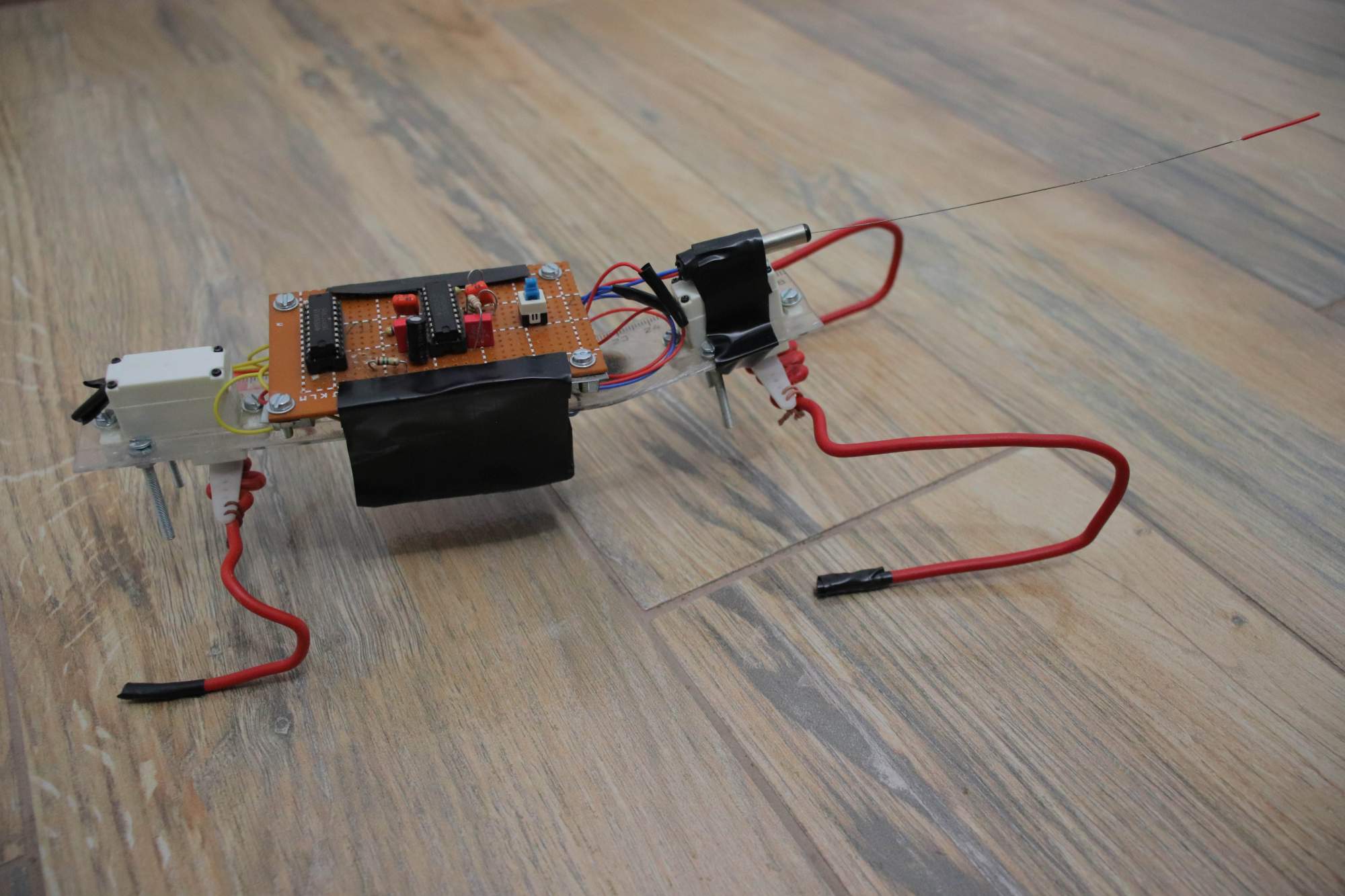
The two servomotors are hacked, which means that it had to be opened, removed the stopper which limits the movement of the motors, canceling the small electronic board in the servomotor. In this case we were interested in the mechanical gear to ensure a slower oscillation.
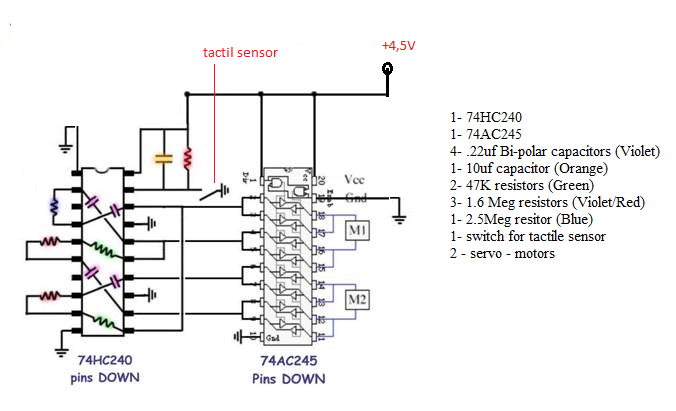
Schematic
This is the schematics I have used ( found it on the internet ) but I remembered that I did some minor adjustments to the circuit because I had some problems with the reverse functionality ( I wired some pins – for someone who wants to test this circuit I recommend looking and studying other diagrams too ).
For the tactile sensor I have used a guitar string and an audio jack.
This was the switch which loads the capacitor which ensure the reverse functionality.
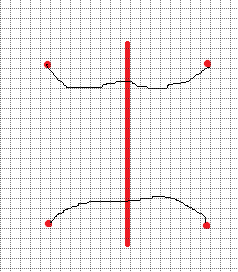
After I finished the project I calibrated my bot using a math sheet and centered its legs so that it touched symmetrically the ground.